近日,燕山大学人工智能学院(软件学院)青年教师宋子盈博士联合北京交通大学、昆士兰大学及轻舟智航等单位合作取得重要研究进展。其成果论文《GuideFlow: Constraint-Guided Flow Matching for Planning in End-to-End Autonomous Driving》被国际计算机视觉领域顶级会议CVPR2026主会录用,并入选Highlight。宋子盈作为该研究的核心组织者与通讯作者之一,主导方法设计、实验验证、论文撰写与合作推进等工作,彰显了学院青年教师在人工智能前沿研究中的创新活力。该论文由刘林、贾彩燕、余冠一、宋子盈、李俊桥、贾飞阳、吴培良、郝孝帅、罗雅丹共同完成,其中贾彩燕、宋子盈共同担任通讯作者。
自动驾驶规划是端到端自动驾驶系统中的核心环节,其输出直接决定车辆的行驶行为与安全性。围绕当前端到端自动驾驶中多模态轨迹生成困难、模式坍塌明显以及安全约束难以显式融入生成过程等关键问题,宋子盈与联合研究团队提出了新型约束引导流匹配规划框架GuideFlow。该方法以流匹配(Flow Matching)为基础,将显式约束直接嵌入轨迹生成过程,并进一步结合能量优化机制,使模型在生成多样化候选轨迹的同时,具备更强的安全约束满足能力与自主优化能力。此外,研究还将驾驶风格参数化为可控条件信号,实现了对车辆轨迹激进度和行为偏好的灵活调节。
在该项研究中,宋子盈作为青年学术骨干及联合负责人,统筹组织相关科研攻关与跨单位协同合作,围绕端到端自动驾驶规划中的关键科学问题,深度主导了算法框架构建、核心模块设计、实验分析和论文凝练等工作。团队针对传统模仿学习规划方法难以兼顾多样性与安全性的瓶颈,从生成式规划建模角度出发,探索将约束机制引入流匹配过程,为自动驾驶轨迹规划提供了新的研究思路。
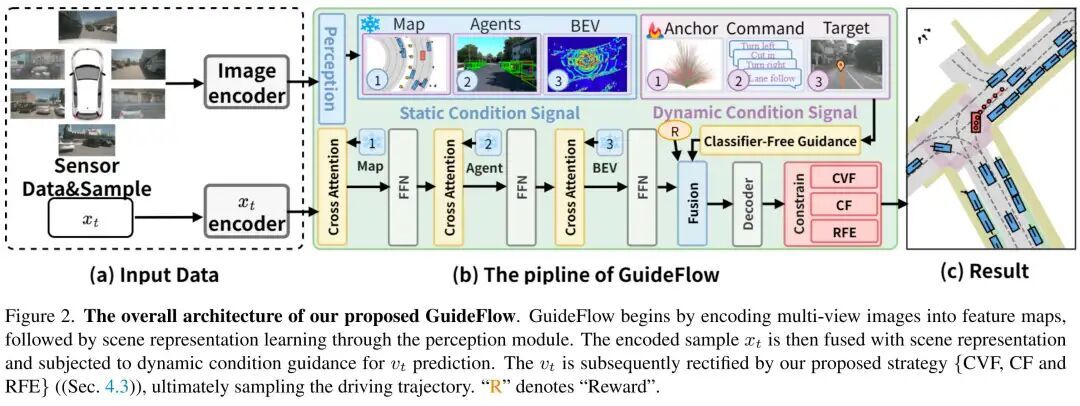
GuideFlow框架图
相关成果在 Bench2Drive、nuScenes、NavSim 和 ADV-NuScenes 等多个主流自动驾驶基准上进行了系统验证,展现出良好的性能与鲁棒性。尤其在复杂场景测试中,GuideFlow 在规划安全性与综合决策能力方面表现突出,体现了该方法在自动驾驶前沿方向上的研究潜力。该成果不仅为生成式轨迹规划研究提供了新的技术路径,也为高安全、高鲁棒自动驾驶系统的构建提供了有益参考。
此次成果的取得,展现了学院持续推进高层次人才引进、加强人工智能领域科研布局的扎实成效。未来,学院将继续深耕人工智能前沿领域,持续引育优秀人才、优化科研布局,鼓励师生勇攀学术高峰。同时不断深化跨校、跨行业交流合作,依托学科优势助推科研创新与技术转化,力争产出更多高水平科研成果,全力推动学院学科建设与科研工作再上新台阶。
CVPR是计算机视觉领域规模最大、影响力最广的顶级国际学术会议,被中国计算机学会(CCF)列为A类会议,与ICCV、ECCV并称视觉方向三大国际顶级会议。本届CVPR将于2026年6月3日至7日在美国科罗拉多州丹佛市科罗拉多会议中心举行。本届会议共收到16,092篇有效投稿,最终录用4,090篇,录用率仅为25.42%。而Highlight选拔更为严苛——以CVPR 2025数据为参照,当年387篇Highlight论文仅占录用论文的约13.5%。






